工具機組態
完成以下步驟以建立與使用虛擬工具機:
- 建立並設定副檔名為
.mt的虛擬工具機檔案。 - 開啟hnproj專案,於【選項/ 機構鏈】指定該檔案.
設定虛擬工具機組態檔案
工具機組態檔案為XML格式,副檔名為.mt。見如下範例。
五軸工具機組態檔案範例
<?xml version="1.0" encoding="utf-8"?>
<XyzabcMachineTool>
<XyzabcChain>
<XyzabcChain>
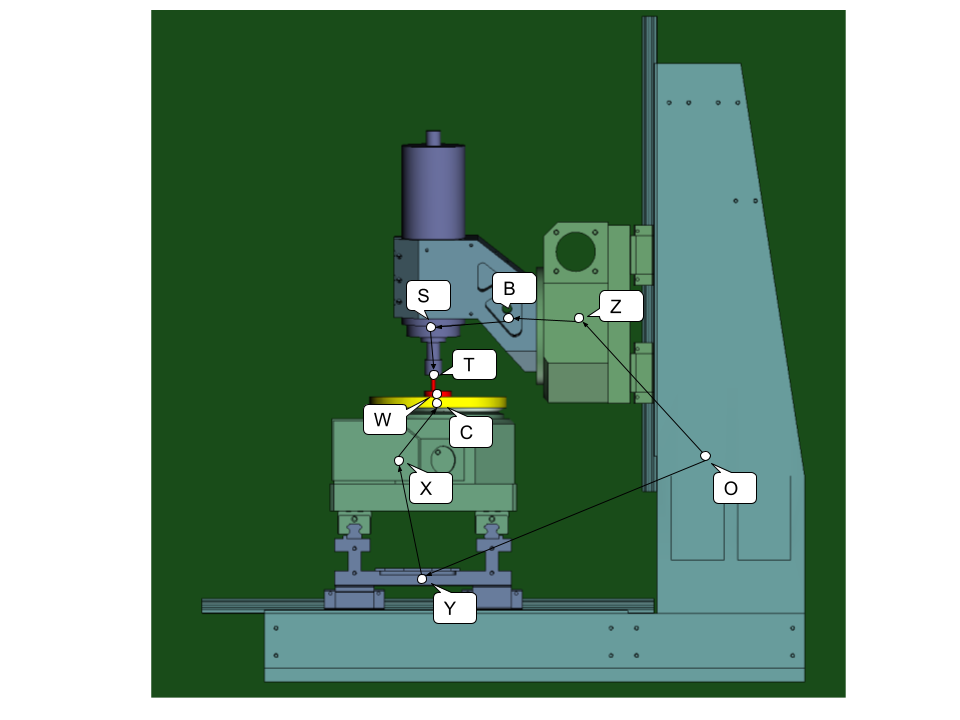
<ChainCode>[O][Y][X][C][w];[O][Z][B][S][t]</ChainCode>
<IsVertical>true</IsVertical>
<TransformerX>
<DynamicTranslation Axis="(-1,0,0)" Len="0" />
</TransformerX>
<TransformerY>
<DynamicTranslation Axis="(0,-1,0)" Len="0" />
</TransformerY>
<TransformerZ>
<DynamicTranslation Axis="(0,0,1)" Len="0" />
</TransformerZ>
<TransformerA />
<TransformerB>
<DynamicRotation Axis="(0,1,0)" Angle_deg="0" Pivot="(-72.4,-177.4,225.94)" />
</TransformerB>
<TransformerC>
<DynamicRotation Axis="(0,0,-1)" Angle_deg="0" Pivot="(0,0,0)" />
</TransformerC>
<ToolBuckleTransformer>
<StaticTranslation Trans="(-72.4,72.4,176.44)" />
</ToolBuckleTransformer>
<TableBuckleTransformer>
<StaticTranslation Trans="(0,0,0)" />
</TableBuckleTransformer>
</XyzabcChain>
</XyzabcChain>
<AnchorToSolid>
<Entry Key="O">
<Solid>
<StlFile>PmcB1s/base.stl</StlFile>
</Solid>
</Entry>
<Entry Key="Y">
<Solid>
<StlFile>PmcB1s/Y.stl</StlFile>
</Solid>
</Entry>
<Entry Key="X">
<Solid>
<StlFile>PmcB1s/X.stl</StlFile>
</Solid>
</Entry>
<Entry Key="C">
<Solid>
<StlFile>PmcB1s/C.stl</StlFile>
</Solid>
</Entry>
<Entry Key="Z">
<Solid>
<StlFile>PmcB1s/Z.stl</StlFile>
</Solid>
</Entry>
<Entry Key="B">
<Solid>
<StlFile>PmcB1s/B.stl</StlFile>
</Solid>
</Entry>
<Entry Key="S">
<Solid>
<StlFile>PmcB1s/S.stl</StlFile>
</Solid>
</Entry>
</AnchorToSolid>
<CollisionIndexPairs AutoGenerate="True" />
</XyzabcMachineTool>
元素功能說明如下:
ChainCode: 構型碼。
IsVertical: 指定是否為立式銑床。若為立式銑床,設為true;若為臥式銑床,設為false。
TransformerX、TransformerY、TransformerZ、TransformerA、TransformerB、TransformerC:
如果工具機沒有對應之運動軸,則不須設定其內容。例如下,該機台沒有A軸:
<TransformerA />
反之,如果該工具機有對應之運動軸,即機構鏈中存在{X,Y,Z,A,B,C}之任一單字,則需設定該元素內容。可設定之內容如下:
DynamicTranslation:線性運動。
DynamicRotation:旋轉運動。
- Angle_deg:機械座標初值。單位為度。
- Pivot:旋轉軸心。為旋轉軸心線上的任意一點。
- Axis:說明如上。
ToolBuckleTransformer:刀具接點。以StaticTranslation設定之。
TableBuckleTransformer:裝夾具或工件的接點(工作臺接點)。以StaticTranslation設定之。
ChainCode 元素
構型碼用來表示工具機的機構鏈。每個工具機元件以中括號及英文字母表示。構型碼中至少須包含基座(O)、刀具接點(t)、工作臺接點(w)。
注意英文字母有區分大小寫
其他常用單字如下:
- S 主軸。
- X、Y、Z 線性運動軸。
- A、B、C 旋轉運動軸。
AnchorToSolid 元素
AnchorToSolid 定義對應機構元件的幾何。如果沒有幾何可對應,可將其設為null
(即<AnchorToSolid/>)。
若否,其內容為Entry元素。Entry的Key屬性為對應之元件構型碼。
範例
範例可於此下載:
最後更新:
2022-03-12