Building Virtual Machine Tools
Complete the following steps to build and use virtual machine tools:
Use the mechanism builder to create the topological structure.
- Specific
Branchnames in the topology structure need to be set with corresponding motion axis keywords.- Linear motion axis keywords corresponding to motion modes are
X,Y,Z. - Rotary motion axis keywords corresponding to motion modes are
A,B,C.
- Linear motion axis keywords corresponding to motion modes are
- Specific
Anchornames in the topology structure need to be set with corresponding keywords.- Keyword
Ois the ground anchor. - Keyword
baseis the base. - Keyword
tis the tool-end anchor. Used for connecting tools. - Keyword
wis the worktable-end anchor. Used for connecting fixtures or workpieces.
- Keyword
Note
Keywords are case-sensitive.
- Specific
Set geometric shapes for anchors. This is optional.
Save the topology structure as a machine tool file.
Best Practices
The most convenient approach is to assemble the machine in CAD software, position the moving elements at the machine origin1, then:
- Export individual main component STL files from the same coordinate system. Then set these STLs into anchors.
- Measure the coordinates of tool-end anchor, worktable-end anchor, and any point on the rotary motion axis pivot relative to the output coordinate system in CAD software, then input these coordinates into the topology structure.
- Due to relative motion, the motion axis direction settings from base to worktable-end are generally negative.
Too many STL meshes will reduce software opening speed and collision detection speed.
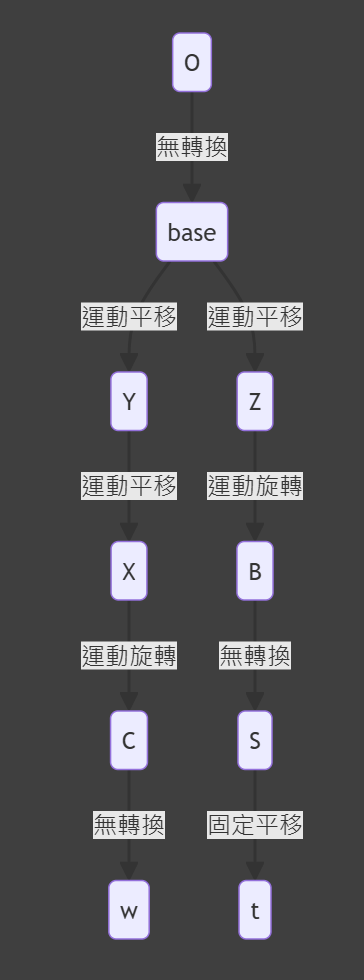
Example: Small Five-axis Vertical Milling Machine
Example: B1.zip
Target virtual milling machine:
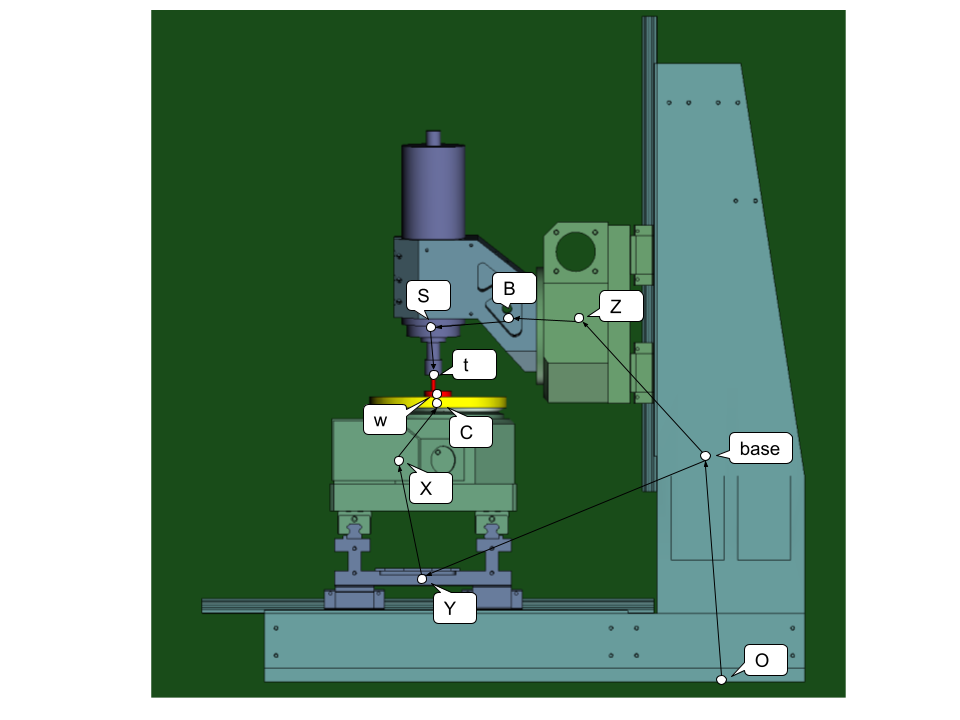
Topology structure:
Building Horizontal Machine Tools
- Create topology structure according to machine tool motion axis coordinates.
- Lay down the machine: set rotation in the connection between ground anchor and machine base anchor, axis direction (0,1,1)(must be normalized), angle 180 degrees.
-
Machine Origin is the position where all machine coordinates (MC, Machine Coordinate) are 0, generally the home position.↩